We are pleased to announce an early release of our research into symbiotic systems. This top-down approach to modelling the complex interactions of industrial autonomous services presents several advancements that will enable a roadmap to trust, resilient autonomous operations and safety compliance. The preprint is available on ArXiv by clicking here and video presentation which includes our autonomous confined space inspection demonstration showcase can be viewed via the Smart Systems Group Youtube Channel or below.
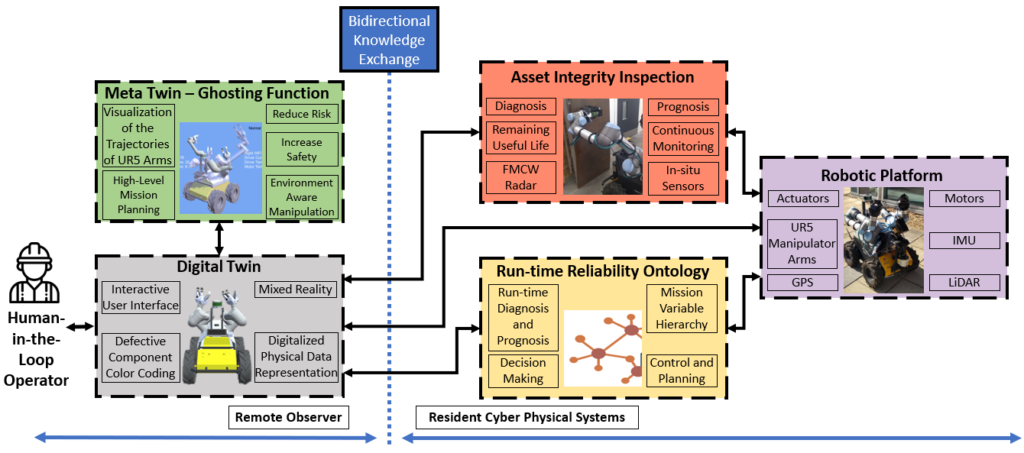
The symbiotic system has been rigorously evaluated as part of a confined space asset integrity inspection mission in an industrial facility. We synchronize digital models of the robot, environment and infrastructure and integrate front-end analytics and bidirectional communication for autonomous adaptive mission planning and situation reporting to a remote operator. A reliability ontology for the deployed robot, based on our holistic hierarchical-relational model, supports computationally efficient platform data analysis. We analyze the mission status and diagnostics of critical sub-systems within the robot to provide automatic updates to our run-time reliability ontology, enabling faults to be translated into failure modes for decision making during the mission. We demonstrate an asset inspection mission within a confined space and employ millimeter-wave sensing to enhance situational awareness to detect the presence of obscured personnel to mitigate risk.